



联系我们 CONTACT US
手机:0317-8290311
电话:18733036768
邮箱:yashengjixie@126.com
地址:河北省泊头市交河镇北工业区
机器人焊接工装夹具的设计要求
添加时间:2024-01-05
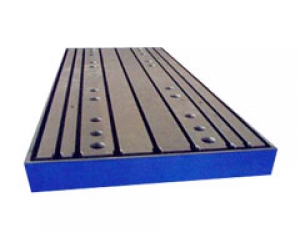
机器人焊接工装又称三维柔性焊接工装,主要是由三维柔性焊接平板以及工装夹具组成合用。平台大面有二个方向,四周边可用作垂直方向的安装,从而达到立体组合。从平台到附件都是标准孔没有传统的螺纹或t型槽,配合快速锁销就能使装配变得更加快捷方便,定位更精确。可根据产品的需求任意组合及调整。
机器人焊接工装夹具的设计要求有哪些
⑴ 机器人焊接工装夹具有动作迅速、操作方便的特点,操作位置应处在工人容易接近、最易操作的部 位。当夹具处于夹紧状态时,应能自锁。 
⑵ 夹具应有足够的装配、焊接空间,所有的定位元件和夹紧机构应与焊道应当保持适当的距离。
⑶ 夹紧可靠,刚性适当。夹紧时不会破坏焊接的定位位置和几何形状,夹紧后既不会使焊件松动滑移,又 不会让焊件的拘束度过大而生产较大的应力。
⑷ 夹紧时不应破坏焊件的表面质量,夹紧薄件时,应限制夹紧力,或者采取压头行程限位、加大压头接触 面积、加添铜、铝衬套等措施。
⑸ 夹具的施力点应位于焊件的支承处或者布置在靠近支承的地方,要防止支承反力与夹紧力、支承反力与 重力形成力偶。
⑹ 为了便于控制,在同一个夹具上,定位器和夹紧机构的结构形式不宜过多,并且尽量只选用一种动力源。
⑺ 工装夹具本身应具有较好的制造工艺性和较高的机械效率。
上一条 : 检验平台的安装与保养
下一条 : 铸铁平板主要用途有哪些

